AstraNomos Labs is advancing a new foundation for understanding motion—one that places geometry, rather than approximation, at the center of physics and engineering. Across our work, we have shown that many systems traditionally modeled as random or diffusive are, in fact, governed by structured constraints that determine how motion can and cannot occur. By reframing transport, flow, and evolution as geometry-constrained processes, we move beyond statistical approximation toward a deterministic description of physical behavior.
Our current research demonstrates this principle across a wide range of domains, from thermal transport in data centers and microchips to fluid behavior in turbine blades and packed-bed reactors. In each case, classical models—based on Fourier diffusion or Navier–Stokes assumptions—fail in the regimes that matter most: where geometry constrains motion and where energy accumulates. By introducing operator-based frameworks that encode these constraints directly, we have consistently achieved more accurate predictions while dramatically reducing computational complexity.
At a deeper level, AstraNomos is developing the mathematical structure that underpins this shift. Drawing on operator theory, spectral analysis, and geometric frameworks rooted in the work of Hilbert, von Neumann, and modern functional analysis, we are building a unified language for motion that applies across scales. This includes ongoing work in areas such as regularity in fluid systems, the structure of apparent randomness, and the deterministic organization of number-theoretic and spectral phenomena. These efforts are not isolated—they form a coherent framework that connects physical systems, mathematical structure, and computational modeling.
Looking forward, this research opens new frontiers in both physics and engineering. In energy systems, it enables a deeper understanding of plasma confinement and transport under extreme conditions. In biological systems, it provides a pathway to model cellular and neural processes as structured flows rather than stochastic interactions. In robotics and artificial intelligence, it suggests that stability, learning, and adaptation may be governed by underlying geometric constraints that can be explicitly resolved rather than statistically inferred.
Ultimately, AstraNomos Labs is working toward a future where simulation is no longer driven by brute-force computation and approximation, but by direct resolution of the structure that governs motion itself. This shift—from mesh-based to operator-based modeling—has the potential to transform how systems are designed, optimized, and understood. By uncovering the deterministic foundations beneath complex behavior, we are enabling a new generation of simulation technologies that are faster, more interpretable, and fundamentally aligned with the physics of the real world.
At AstraNomos Labs, we are redefining fusion not as a problem of brute-force confinement, but as one of structured energy and controlled dynamics. Traditional approaches to fusion rely on extreme conditions—temperature, pressure, and magnetic confinement—while treating instability and turbulence as unavoidable challenges. Our work suggests a fundamentally different path: that plasma behavior, like all motion, is governed by underlying operator structure, and that confinement and stability can be achieved by aligning with this structure rather than overpowering it. By applying our operator-based framework, we model plasma not as a chaotic system, but as a low-dimensional, modal system governed by spectral dynamics. This allows us to identify and control the dominant modes that drive instability, transforming turbulence from a limiting factor into a predictable and manageable phenomenon. Instead of fighting the system at scale, we work within its intrinsic dynamics—designing configurations where energy flow, confinement, and stability emerge naturally from the governing mathematics. The result is a pathway toward real fusion systems grounded in structure rather than brute force. By replacing approximation and stochastic tolerance with operator-driven design, we open the possibility of more efficient, stable, and scalable fusion reactors. At AstraNomos Labs, we believe that achieving practical fusion is not simply a matter of engineering extremes, but of understanding the true nature of motion and energy—and using that understanding to build systems that operate in harmony with it.
At AstraNomos Labs, we approach Artificial Intelligence not as a purely statistical system, but as a structured dynamical process governed by underlying operators. Our research reframes intelligence as the evolution of signals within a constrained spectral space, where patterns, decisions, and behaviors emerge from identifiable structure rather than randomness. This enables AI systems that are more interpretable, more stable, and more closely aligned with the true dynamics of the environments they operate in. Our work focuses on developing operator-driven AI frameworks that unify perception, reasoning, and action within a common mathematical foundation. By representing information and motion in the same modal space, we bridge the gap between abstract intelligence and physical systems. This allows AI to move beyond reactive or probabilistic responses and instead operate with a deeper understanding of structure, enabling more reliable prediction, control, and adaptation in real-world settings. The result is a new direction for AI—one in which intelligence is not approximated through data alone, but derived from the governing structure of systems themselves. This approach opens the door to more efficient learning, more robust decision-making, and tighter integration between AI and engineered platforms such as robotics, simulation, and digital twins. At AstraNomos Labs, we are building the foundations for AI systems that are not only powerful, but fundamentally aligned with the dynamics of motion and reality.
At AstraNomos Labs, we are advancing a new class of BioFusion digital twins, where biological systems are modeled with the same operator-driven precision as engineered systems. Rather than relying on coarse approximations or purely statistical methods, our framework captures the underlying structure of biological motion, energy flow, and interaction through a spectral-operator formulation. This allows us to represent complex biological behavior in a low-dimensional, interpretable form that is both computationally efficient and physically grounded. Our BioFusion research focuses on bridging the gap between living systems and engineered models, enabling high-fidelity simulation of bio-hybrid dynamics. By treating biological processes not as random or noisy, but as structured systems governed by underlying operators, we unlock the ability to simulate, predict, and ultimately design biological interactions with unprecedented accuracy. This has implications across domains, from cellular dynamics and tissue modeling to bio-integrated robotics and adaptive materials. The result is a new paradigm in biological simulation—one in which structure replaces randomness, and prediction emerges naturally from the governing dynamics. By bringing operator-based modeling into the biological domain, AstraNomos Labs is laying the foundation for next-generation digital twins that can inform research, accelerate discovery, and enable tighter integration between biological intelligence and engineered systems.
Applied Operator Frameworks in Physics, Intelligence, and Engineering
From Theory to Reality: The AstraNomos Framework
Applying the Operator-Structured Primitive of Motion Across Physics, Intelligence, and Engineering
At AstraNomos Labs, our research is grounded in a single unifying principle: motion is not random, but governed by a geometry-conditioned operator whose spectral structure defines all admissible dynamics. This foundation—formally developed in our recent work—demonstrates that what has traditionally been treated as noise is in fact structured, low-dimensional behavior arising from underlying modal interactions. By establishing motion as an operator-driven process, we move beyond approximation and into a framework where prediction, control, and simulation emerge naturally from first principles.
This section presents how that foundational framework extends across domains. While the whitepaper below establishes the primitive mathematically and validates it empirically in robotic systems, AstraNomos Labs applies the same operator-first perspective to real-world challenges in biology, artificial intelligence, and fusion energy. Each area represents a different manifestation of the same underlying truth: complex systems are not governed by randomness, but by structured dynamics that can be identified, modeled, and controlled through their spectral properties.
Together, these research directions form a coherent program aimed at replacing mesh-driven, high-dimensional, and noise-tolerant approaches with operator-driven, low-dimensional, and predictive systems. Whether modeling cellular behavior, enabling intelligent systems, or stabilizing plasma for fusion, the objective is the same: to work within the true structure of motion rather than against it. AstraNomos Labs exists to translate this mathematical foundation into technologies that redefine simulation, control, and design across disciplines—bridging theory and application in a unified, scalable framework.
Read Our Whitepaper
The End of Stochastic Motion in Robotics
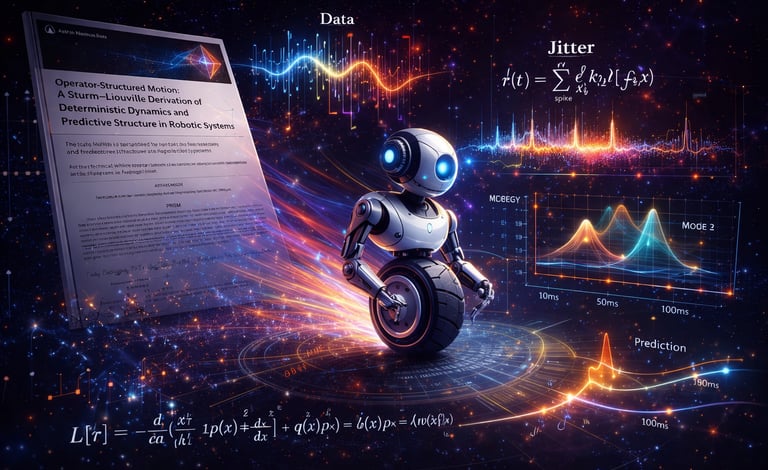
"Operator-Structured Motion: A Sturm-Liouville Derivation of Deterministic Predictive Structure in Robotic Systems"
This whitepaper presents a fundamental result: what engineers have traditionally treated as noise in robotic systems is, in fact, structured and deterministic. Through high-frequency empirical analysis and a rigorous operator-based formulation, we show that residual motion—commonly referred to as jitter—collapses onto a low-dimensional set of modes governed by a geometry-conditioned operator. Rather than being unpredictable, these dynamics are spectrally organized, repeatable across regimes, and evolve according to well-defined eigenstructure.
From this foundation, prediction is no longer an approximation layered on top of a model—it becomes a direct consequence of the system itself. By expressing motion in its admissible modal basis, future behavior follows naturally from the operator semigroup, enabling meaningful prediction over real control timescales without reliance on stochastic assumptions. This unifies representation, interpretation, and prediction within a single framework, demonstrating that the apparent randomness in motion arises from unresolved structure, not from fundamental uncertainty.
The implications for simulation are profound. Traditional approaches rely on mesh-driven discretizations and high-dimensional state representations to approximate behavior, often at significant computational cost while still leaving residual variability unexplained. In contrast, the operator-based framework captures the intrinsic structure of motion directly, reducing systems from millions of degrees of freedom to a small number of governing modes. Simulation shifts from approximation to representation—faster, more accurate, and inherently predictive.
For industry, this represents a step change in capability. Engineers can design and control systems within their true dynamic subspace, rather than compensating for behavior after the fact. This leads to more stable robotic platforms, more efficient control strategies, and dramatically reduced computational overhead in digital twins and real-time simulation. What was once filtered out as noise becomes a source of actionable insight, enabling systems that are not only more reliable, but fundamentally better understood.
More broadly, these findings suggest a redefinition of motion in physics and engineering. Instead of viewing systems as high-dimensional processes perturbed by randomness, we can understand them as structured, operator-governed dynamics evolving on low-dimensional manifolds. This shift—from stochastic approximation to operator-driven structure—opens a new direction for simulation, control, and design across robotics, energy systems, and beyond, laying the groundwork for a new generation of deterministic, predictive technologies.